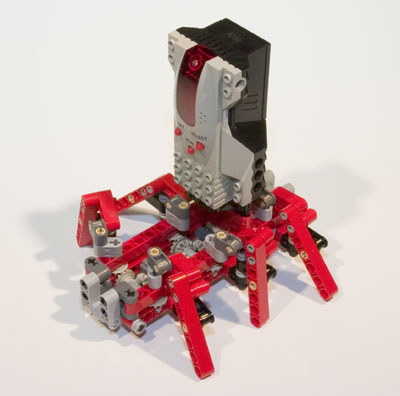
MicroSCOUTを使った6足歩行ロボット。 なお、たこは6足でない。
上向きの回転軸から、うまく動きを導いて、 立体的な脚の動きに変換している。
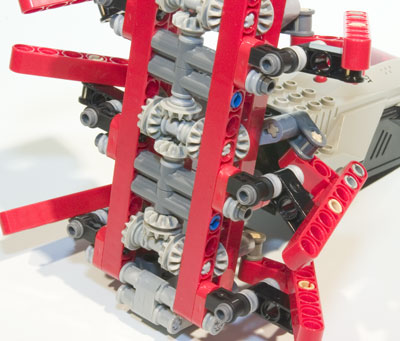
小さなギアがいっぱい。
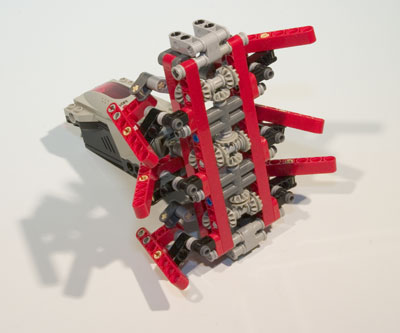
リフトアームを使う(ビームを使わない)ことを徹底すると、 かなり小さく機構を詰め込むことができる。 例えば、ボディのフレームとなる、 左右2本ずつの長い赤色のアーム(写真では縦に見える)の すき間は半ポッチ。 ビームでは作れない構造である。
ムービーはこちら (QuickTime Movie)